






Choosing an electronic boost controller? Here is a good run-down...

9 Second Club
Joined: Nov 2003
Posts: 13,616
Likes: 185
From: Norn Iron
I think I could just run closed loop PIDs to target and maintain G in relation to traction. I just don't know enough about using G for boost control to do it without a ton of research. You would give the PID a target G, and it would take full control of boost solenoid PWM to match target.
Do you only target a certain G below a certain MPH for traction and then ignore G once you're really moving? I don't think G would be so relevant at 140 mph.
Do you only target a certain G below a certain MPH for traction and then ignore G once you're really moving? I don't think G would be so relevant at 140 mph.
And you taking about 3g and 1g i have a hard time believing you know anything about what G forces are really doing unless you are taking about 3000hp car going down track
9 Second Club
Joined: Nov 2003
Posts: 13,616
Likes: 185
From: Norn Iron
On most roads or even crappy airfields here, I can barely manage more than 0.6g and even those instances are rare because conditions vary so much. Obviously this will vary during a run/distance too...
Hence it is exactly what I said, a HUGE variable.
If you can hit a specific high acceleration g target for your vehicle on every road, with every tyre under all driving conditions...then that would be truly exceptional
I think I could just run closed loop PIDs to target and maintain G in relation to traction. I just don't know enough about using G for boost control to do it without a ton of research. You would give the PID a target G, and it would take full control of boost solenoid PWM to match target.
Do you only target a certain G below a certain MPH for traction and then ignore G once you're really moving? I don't think G would be so relevant at 140 mph.
Do you only target a certain G below a certain MPH for traction and then ignore G once you're really moving? I don't think G would be so relevant at 140 mph.
A tire/surface only has traction to supply a certain amount of acceleration (G).... Regardless of the speed
Yes it changes some based on if you are using the chassis actively at lauch and say with down pressure at speed but it is a narrow range. Especially when on the street
Hp needed to deliver G goes up exponential with speed
To do 1g at 30 mph takes nothing.... To do 1g at 150mph takes some serious power
Say on my car... On nittos and asphalt.
I know the tires will hold around .85g. above that you are going to start having problems
Around 110ish mph is when I Run out of power to sustain .85g.. and that's with enough power in to be trapping 170+ at the track
If you had a solid base boost strategy developed say like I do.... And then you had a closed loop PID targeting G modifying the the base boost curve....... It could work amazing
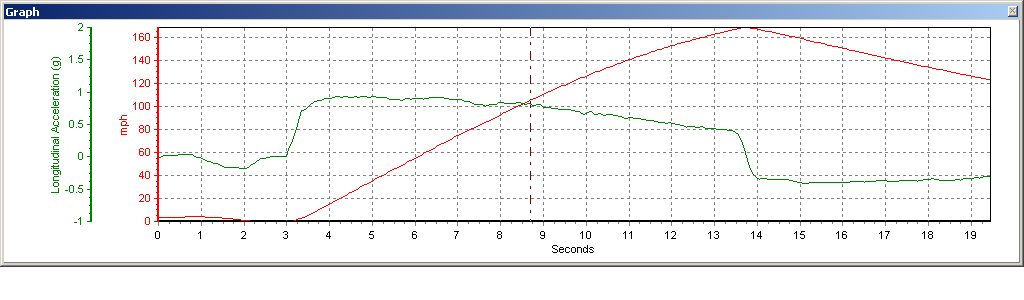
Here is track pass where full power is in within 1 second (not me ero). Note the G trend

Here is how mine is on the street. Trying to hit and hold .85G
The boost curve to do that will not look like you think it would that is for sure
It would amaze you how this works, and I am serious.
I can stop on the highway, not do a burnout of any sort and run a 9.50 on what most consider monkey poo tires
Doesn't matter if the road is 100 or 30, or if I move to nice concrete. The max attainable G doesn't move drastically like Stevie is insinuating. Not like all of a sudden it's .5g and then 1.5g on another surface. Unless you are racing on water

And if even if the the G limit does move.... The most important thing is we have the curve developed.
We simply move the curve left or right
It happens sooner to deliver higher, and it happens later to deliver less
We simply move the curve left or right
It happens sooner to deliver higher, and it happens later to deliver less
9 Second Club
Joined: Nov 2003
Posts: 13,616
Likes: 185
From: Norn Iron
Your roads are clearly far more consistent than anything here !
Even same roads here can vary massively depending on weather, temperature etc etc.
Even the same shitty airfield we have here can vary massively. And if using g as a reference, 0.1, 0.15g can be considered as a pretty huge difference
Even same roads here can vary massively depending on weather, temperature etc etc.
Even the same shitty airfield we have here can vary massively. And if using g as a reference, 0.1, 0.15g can be considered as a pretty huge difference

Restricted User
Joined: Mar 2014
Posts: 7,192
Likes: 109
From: Ohio
Here is how mine is on the street. Trying to hit and hold .85G
The boost curve to do that will not look like you think it would that is for sure
It would amaze you how this works, and I am serious.
I can stop on the highway, not do a burnout of any sort and run a 9.50 on what most consider monkey poo tires
Doesn't matter if the road is 100 or 30, or if I move to nice concrete. The max attainable G doesn't move drastically like Stevie is insinuating. Not like all of a sudden it's .5g and then 1.5g on another surface. Unless you are racing on water
The boost curve to do that will not look like you think it would that is for sure
It would amaze you how this works, and I am serious.
I can stop on the highway, not do a burnout of any sort and run a 9.50 on what most consider monkey poo tires
Doesn't matter if the road is 100 or 30, or if I move to nice concrete. The max attainable G doesn't move drastically like Stevie is insinuating. Not like all of a sudden it's .5g and then 1.5g on another surface. Unless you are racing on water
Solenoid response if obviously going to be slower, so I use a few datalogs to tighten up the PWM min/max limits and we have ourselves a perfect working G-based boost controller.

TECH Fanatic




Joined: Sep 2013
Posts: 1,008
Likes: 126
From: Mechanicsburg, PA
I think I speak for many here in saying, I like how you guys think. A "simple" setup like this would be great for some of the marginal tracks around here as well. If this develops farther, I for one am following with great expectation.
LS1 Tech Stories
The Best V8 Stories One Small Block at Time

Topdon ONE vs. Artidiag 800 BT2: Which is the Diagnostic Tablet For You?
Pouria Savadkouei
Gas Monkey Built a 6-Wheel Ferrari Testarossa With a Corvette LT4 Engine
Verdad Gallardo
7 Most Reliable High-Performance Engines GM Has Ever Built
Verdad Gallardo
Amazing '71 Camaro Restomod Is Modern Muscle Car Under the Skin
Verdad Gallardo
6 Common C5 Corvette Failures and What's Involved In Repairing Them
Pouria Savadkouei
Retro Modern Bandit Pontiac Trans AM Comes With Burt Reynolds' Autograph
Verdad Gallardo
Top 10 Greatest Cadillac V Series Performance Models Ever, Ranked
Pouria Savadkouei
Top 10 Most Powerful Chevy Trucks Ever Made!

Hennessey's New Supercharged Silverado ZR2 Has 700 HP
Verdad Gallardo Restricted User
Joined: Mar 2014
Posts: 7,192
Likes: 109
From: Ohio
I did some mild sketches and have a complete setup ready to go, with absolutely no way to test it since all of my cars are down for winter rebuilds/upgrades.
Parts list:
VR conditioner circuit (I use this for traction control too) - $28
Ebay Arduino Nano - $3
3 Port MAC valve - $25
3G accelerometer - $15
Total cost - $71
Inputs:
-Front wheel speed for MPH
-Rear wheel speed for traction
-5v signal from MAP sensor
-Accelerometer G
-Target G (Variable)
-Max boost (Variable)
Example:
-Max boost = 20 PSI
-Target G = 1 G
Input target G and current G into the PID and it will output duty cycle for the 3 port MAC valve.
Read the MAP, if boost > or = Max Boost, do nothing (maybe reduce the duty cycle a little?)
If Rear wheel speed > Front wheel speed, reduce duty cycle for traction.
As long as you aren't at MAX boost yet and you aren't spinning the tires, the PID should be able to keep the MAC valve dead set on target G.
Should be cake. Very little programming, very little $$$.
Parts list:
VR conditioner circuit (I use this for traction control too) - $28
Ebay Arduino Nano - $3
3 Port MAC valve - $25
3G accelerometer - $15
Total cost - $71
Inputs:
-Front wheel speed for MPH
-Rear wheel speed for traction
-5v signal from MAP sensor
-Accelerometer G
-Target G (Variable)
-Max boost (Variable)
Example:
-Max boost = 20 PSI
-Target G = 1 G
Input target G and current G into the PID and it will output duty cycle for the 3 port MAC valve.
Read the MAP, if boost > or = Max Boost, do nothing (maybe reduce the duty cycle a little?)
If Rear wheel speed > Front wheel speed, reduce duty cycle for traction.
As long as you aren't at MAX boost yet and you aren't spinning the tires, the PID should be able to keep the MAC valve dead set on target G.
Should be cake. Very little programming, very little $$$.

TECH Fanatic
Joined: Sep 2013
Posts: 1,008
Likes: 126
From: Mechanicsburg, PA
What about if your at the track and the front wheels are off the ground? Could you set up a delay to give the front end time to settle down? One local track has a great starting line (concrete) and then lumpy blacktop from there on.
Restricted User
Joined: Mar 2014
Posts: 7,192
Likes: 109
From: Ohio
Yeah, a delay would be pretty much mandatory for the track, since that first 60' is going to have a lot higher G and a delay would keep it from killing boost. Programming in a delay is a piece of cake. I've tried using a GPS module before, but it was such a hassle I just switched to reading front/rear ABS sensors. I also have a bunch of adapters made for older transmission that had cable driven speedometers that would allow me to run an electric speedo, and I can tap into that signal instead of rear ABS for a car that doesn't have rear ABS.
Restricted User
Joined: Mar 2014
Posts: 7,192
Likes: 109
From: Ohio
Seems like a good place to ask. I have an exile Msbc-1, aka innovate, ebc and I want to use compressed air as a pressure source. What I cannot find, either online or in the manual, is what I should regulate the pressure to for it, and does the controller need any input telling it what the incoming air pressure is.
wild *** guess>>>>close to what it would see from compressor-side air? i mean its probably got a PID controller that uses one input, a table and some calculus to figure out how to pulse the boost solenoid
I guess that is correct, got ahold of rick and he told me 2-3 psi above what target boost pressure would be. Doesn’t seem like there is really any advantage to using compressed air that way vs boost pressure straight off the compressor outlet?
