
1967 Cougar build (over 500 pictures and videos)



 11-16-2018, 06:25 PM
11-16-2018, 06:25 PM
#984
TECH Senior Member
 11-18-2018, 10:37 AM
11-18-2018, 10:37 AM
#985
TECH Senior Member
Thread Starter
iTrader: (7)

Yup....here we go....
I have been digging deeper into the ins and outs of the Toyota EPAS system. One thing that I ran across is that the Toyota systems have a "torque sensor zero point calibration" that must be performed in case of a wheel re-alignment or if the motor assembly is replaced. This is described well here (toward the bottom of the page):
https://www.autoserviceprofessional....teering?Page=3
As far as I have seen, nobody has talked about this when installing the Toyota gear into older vehicles. This seems like a very important procedure and the fact that nobody is doing it, leads me to believe that it is partially (if not fully) to blame for the lack of centering that I (and others) are experiencing with the system.
Another thing that I found out, and this is a bit confusing, is that apparently, the Yaris ECU doesn't actually go into full speed assist mode unless it sees an RPM signal come across the CAN bus. This is confusing to me because I swear that my system does change the level of assist based on speed, but I have no concrete way to verify this, except for how it "feels" to drive. This has also been tested by others on the bench by connecting a square wave generator to the Yaris ECU speed input (pin 5) and reporting variability in assist level based on altering the pulsing frequency.
The information found here is invaluable (post #23):
http://www.toymods.org.au/forums/thr...steering/page2
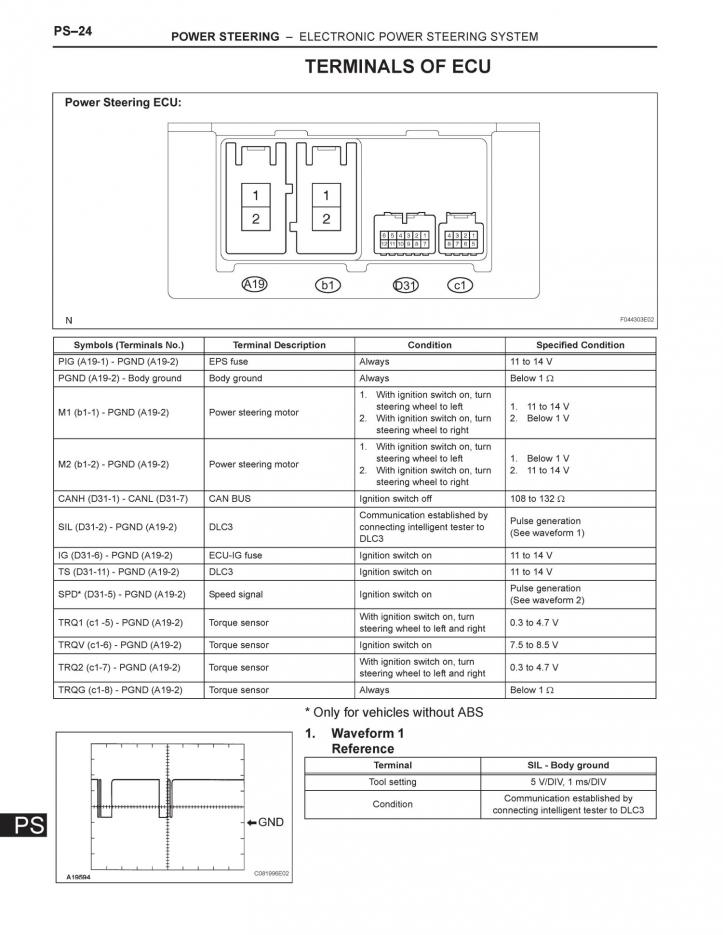
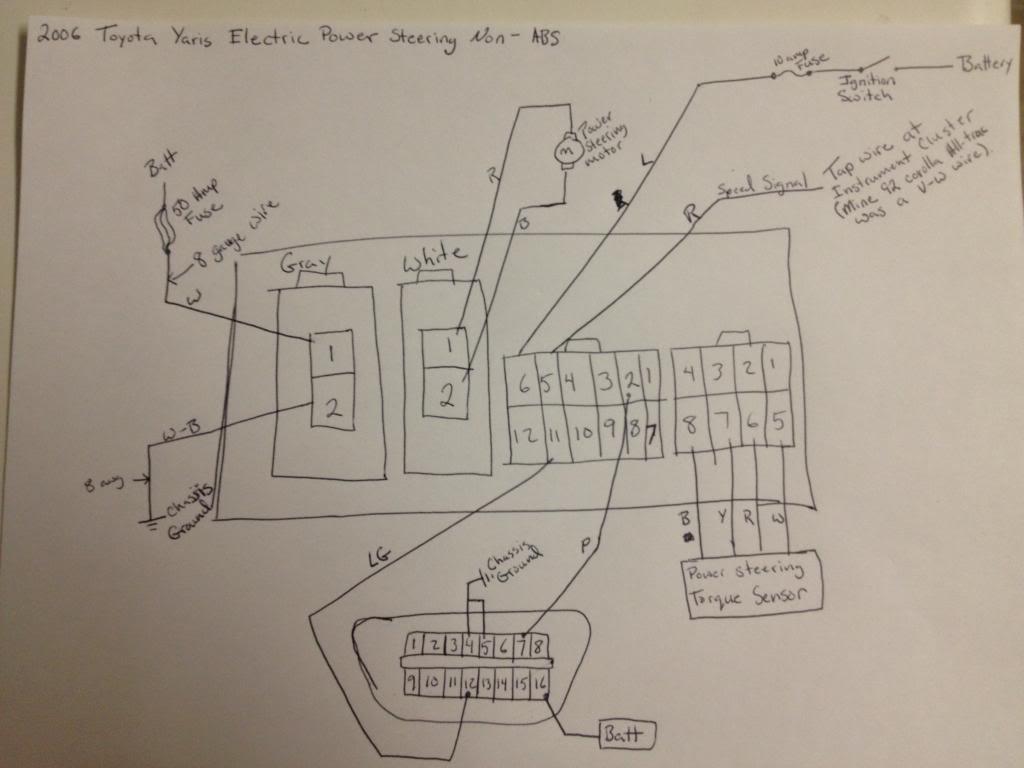
I have been in email contact with the original poster (his name is Jared) of that thread. Here is a more complete pin-out for the Yaris steering ECU:
This is a wiring diagram that Jared put together.
Jared solved the CAN signal issue by using and custom programming the CANdo Auto Module:
http://www.cananalyser.co.uk/candoauto.html
Here is an excerpt from his post on the Toyota forum:
"I going to jump into technical which will make much more sense once you research the CAN system. I was able to find the hex decimal code for engine RPM is 2C4 wheel speed is either 0B0 or 0B2. Since my setup has a non ABS eps ecu has an analog wheel speed signal (input). I only needed the engine RPM on the CAN network so i will only go over how I programed the Cando for this. The Cando has 2 analog inputs that can be programed to then transmit programable CAN data. It also can have ten static data points programed and continually repeated. When you get the software open there are four tabs. "Input view", "Input setup", "CAN transmit" and "CAN setup" first off we need to go to "CAN setup" and change the setting to 500kps to match the network speed of the CAN system. Then back to the tab "CAN transmit". Now as I said earlier the hex for RPM is 2C4. The data length is 11 bit. The dlc is 8. The information I used was ramdomly picked after much trial and error. Almost 3 pages of codes I tried. I could set the RPM in connect my scan tool and see the RPM but still no assist. After much frustration I finally realised that it was a setting I had wrong. It was how often I had it repetting the message. The end result looked something like this 2C4 8 06 8A 00 19 00 00 92 09 Repeat rate 20 ms(milliseconds). All this done and turned the car on and immediate assist. I still have not been able to drive the car and see if it feels bettter. Still working on some idle issues with the engine. I could however tell the assist was greater. Last thing to work on is connecting the CAN wiring to the DLC so i can see about changing the setting for the assist level at idle."
What makes this more frustrating for me is that the Holley Dominator does use CAN communication. This is used for communication with Racepak and the Holley digital displays. The frustrating part is that the Holley CAN protocol is proprietary, so the odds of the Yaris steering computer "understanding" the Holley data packets are nil.
Before I go down the same path as Jared, I need to have a conversation with DCE. Their Microsteer ECU is speed sensitive. The only question remains is if the Microsteer ECU is compatible with the Toyota motor. If it is compatible, then I am inclined to ditch the Toyota ECU and simplify this ordeal by spending money on the Microsteer ECU instead of buying the CANdo box. I also need to find out how DCE handles the torque sensor center point calibration, as this seems rather important for obtaining satisfactory on-center feel and return.
I am open to thoughts and suggestions!!!
Andrew
I have been digging deeper into the ins and outs of the Toyota EPAS system. One thing that I ran across is that the Toyota systems have a "torque sensor zero point calibration" that must be performed in case of a wheel re-alignment or if the motor assembly is replaced. This is described well here (toward the bottom of the page):
https://www.autoserviceprofessional....teering?Page=3
As far as I have seen, nobody has talked about this when installing the Toyota gear into older vehicles. This seems like a very important procedure and the fact that nobody is doing it, leads me to believe that it is partially (if not fully) to blame for the lack of centering that I (and others) are experiencing with the system.
Another thing that I found out, and this is a bit confusing, is that apparently, the Yaris ECU doesn't actually go into full speed assist mode unless it sees an RPM signal come across the CAN bus. This is confusing to me because I swear that my system does change the level of assist based on speed, but I have no concrete way to verify this, except for how it "feels" to drive. This has also been tested by others on the bench by connecting a square wave generator to the Yaris ECU speed input (pin 5) and reporting variability in assist level based on altering the pulsing frequency.
The information found here is invaluable (post #23):
http://www.toymods.org.au/forums/thr...steering/page2
I have been in email contact with the original poster (his name is Jared) of that thread. Here is a more complete pin-out for the Yaris steering ECU:
This is a wiring diagram that Jared put together.
Jared solved the CAN signal issue by using and custom programming the CANdo Auto Module:
http://www.cananalyser.co.uk/candoauto.html
Here is an excerpt from his post on the Toyota forum:
"I going to jump into technical which will make much more sense once you research the CAN system. I was able to find the hex decimal code for engine RPM is 2C4 wheel speed is either 0B0 or 0B2. Since my setup has a non ABS eps ecu has an analog wheel speed signal (input). I only needed the engine RPM on the CAN network so i will only go over how I programed the Cando for this. The Cando has 2 analog inputs that can be programed to then transmit programable CAN data. It also can have ten static data points programed and continually repeated. When you get the software open there are four tabs. "Input view", "Input setup", "CAN transmit" and "CAN setup" first off we need to go to "CAN setup" and change the setting to 500kps to match the network speed of the CAN system. Then back to the tab "CAN transmit". Now as I said earlier the hex for RPM is 2C4. The data length is 11 bit. The dlc is 8. The information I used was ramdomly picked after much trial and error. Almost 3 pages of codes I tried. I could set the RPM in connect my scan tool and see the RPM but still no assist. After much frustration I finally realised that it was a setting I had wrong. It was how often I had it repetting the message. The end result looked something like this 2C4 8 06 8A 00 19 00 00 92 09 Repeat rate 20 ms(milliseconds). All this done and turned the car on and immediate assist. I still have not been able to drive the car and see if it feels bettter. Still working on some idle issues with the engine. I could however tell the assist was greater. Last thing to work on is connecting the CAN wiring to the DLC so i can see about changing the setting for the assist level at idle."
What makes this more frustrating for me is that the Holley Dominator does use CAN communication. This is used for communication with Racepak and the Holley digital displays. The frustrating part is that the Holley CAN protocol is proprietary, so the odds of the Yaris steering computer "understanding" the Holley data packets are nil.
Before I go down the same path as Jared, I need to have a conversation with DCE. Their Microsteer ECU is speed sensitive. The only question remains is if the Microsteer ECU is compatible with the Toyota motor. If it is compatible, then I am inclined to ditch the Toyota ECU and simplify this ordeal by spending money on the Microsteer ECU instead of buying the CANdo box. I also need to find out how DCE handles the torque sensor center point calibration, as this seems rather important for obtaining satisfactory on-center feel and return.
I am open to thoughts and suggestions!!!
Andrew
11-18-2018, 10:56 AM
#986
TECH Resident

Glad to be thinking about projects appreciate the kind welcome back. Other parts of my life have been pretty busy and my old '51 in steady state.
Interesting that procedure to setup a replacement EPS in the Yaris. I suppose it makes sense the need to set zero position reference.
Can you measure the current demand as you are driving and turning to see how the system responds? I'm guessing there is correlation to current loads vs. torque output from the EPS... would that data help you confirm how it is working? I realize the goal is proper boost and steering feel, but maybe confirming how it operates would help with tuning.
Doug
Interesting that procedure to setup a replacement EPS in the Yaris. I suppose it makes sense the need to set zero position reference.
Can you measure the current demand as you are driving and turning to see how the system responds? I'm guessing there is correlation to current loads vs. torque output from the EPS... would that data help you confirm how it is working? I realize the goal is proper boost and steering feel, but maybe confirming how it operates would help with tuning.
Doug
11-18-2018, 11:11 AM
#988
TECH Senior Member
Thread Starter
iTrader: (7)
Not sure. The Microsteer system with the steering motor is a little over a grand. I really don't want to (and really can't at this point) redo my hardware installation. I like that the Prius motor is clocked to the right, while the Microsteer motor is clocked to the left. One thing that I really like about the Microsteer motor is that it has very nice (3) points of attaching the column tubes, both at the top and at the bottom.
As I learn more about all this it becomes very clear that as Michael said, the devil is in the programming details.
Andrew
As I learn more about all this it becomes very clear that as Michael said, the devil is in the programming details.
Andrew
11-18-2018, 04:42 PM
#990
At the car show yesterday, spent a bit of time tallking to a fellow who bought a professionally built '53 Ford pickup powered by a 3.5L twin turbo Ecoboost. Guessing this was a $150,000-$200,000 build. He loved the truck. With one exception. Said the power steering was just terrible. Couldn't keep it straight on the highway. Way over boosted at speed. Sure 'nuff -- I looked and saw the EPS unit on the column under the dash. He was working with his mechanic to see about some sort of 'adjustment black box' to see if it would help.
So, all these Firestone/NTB/Discount tire minimum wage alignment specialists now have to run through a centering procedure for every EPS contemporary car they align? What could possibly go wrong? (chuckle)
So, all these Firestone/NTB/Discount tire minimum wage alignment specialists now have to run through a centering procedure for every EPS contemporary car they align? What could possibly go wrong? (chuckle)

 11-18-2018, 08:36 PM
11-18-2018, 08:36 PM
#992
TECH Senior Member
Thread Starter
iTrader: (7)
At the car show yesterday, spent a bit of time tallking to a fellow who bought a professionally built '53 Ford pickup powered by a 3.5L twin turbo Ecoboost. Guessing this was a $150,000-$200,000 build. He loved the truck. With one exception. Said the power steering was just terrible. Couldn't keep it straight on the highway. Way over boosted at speed. Sure 'nuff -- I looked and saw the EPS unit on the column under the dash. He was working with his mechanic to see about some sort of 'adjustment black box' to see if it would help.
So, all these Firestone/NTB/Discount tire minimum wage alignment specialists now have to run through a centering procedure for every EPS contemporary car they align? What could possibly go wrong? (chuckle)
So, all these Firestone/NTB/Discount tire minimum wage alignment specialists now have to run through a centering procedure for every EPS contemporary car they align? What could possibly go wrong? (chuckle)
Andrew
11-18-2018, 09:28 PM
#994
TECH Senior Member
11-19-2018, 12:17 AM
#995
I bought a car that looked like that and the previous owner couldn't understand why it never ran properly and nothing worked. I threw away every single wire...
I bet the CAN thing with Holley is really irritating. Why go to the trouble to make a CAN based protocol, then make it proprietary?
11-20-2018, 09:32 PM
#996
TECH Senior Member
Thread Starter
iTrader: (7)
Sadly I had to look twice too.
I bought a car that looked like that and the previous owner couldn't understand why it never ran properly and nothing worked. I threw away every single wire...
I bet the CAN thing with Holley is really irritating. Why go to the trouble to make a CAN based protocol, then make it proprietary?
I bought a car that looked like that and the previous owner couldn't understand why it never ran properly and nothing worked. I threw away every single wire...
I bet the CAN thing with Holley is really irritating. Why go to the trouble to make a CAN based protocol, then make it proprietary?
The ultimate goals are:
1. Simulate an RPM signal over CAN so the steering ECU thinks the engine is running (this will power up the steering ECU).
2. Properly terminate the CAN network so the steering ECU thinks there is normal communication with the engine ECM.
3. Make all the connections between the steering ECU and CAN to the DLC3 (OBDII) connector.
4. Attach a Toyota scanner and see if the steering ECU is throwing any codes (I am sure it is).
5. Clear codes (this is important because the torque sensor zero point calibration will not be performed when there are codes).
6. Perform torque sensor zero point calibration (hopefully this helps with return to center).
7. Varify that the steering ECU is seeing vehicle speed (this will show up on the scanner).
8. Enjoy EPAS to its fullest glory.
As I see it, going through all this trouble will also allow me to use a scanner in the future in case something is not working right. As it stands right now, I have very little to guide me should a problem arise anywhere in the system.
Andrew
11-26-2018, 03:46 PM
#998
TECH Senior Member
Thread Starter
iTrader: (7)
I hope that everyone had a great Thanksgiving Holiday. My wife and I traveled to Wisconsin to visit her family, and we made it out just in time to miss the snow.
I am learning way more than I wanted about CAN, Arduino, RasberryPies, and all manner of other electronic gizmos, than I really planned on with this electronic steering business. However, I feel like I have to make the system work as it was intended by Toyota in order to get the most out of it and to be able to diagnose it in the future should something fail.
This afternoon I popped into the local junk yard to track down an OBDII connector (or two). I quickly realized that although the connectors are universal in terms of the mating portion, various manufacturers use different connector bodies and terminals. After I realized this, I started looking for the same make of car. It just so happened that I had relatively easy access to a few Nissans and they graciously offered their connectors in the form of a OBDII bouquet.

I only need one connector, but I figured it was a good idea to have extra wires and terminals, just in case.
I also managed to secure reliable help with the CANBUS emulator (that's what I am calling it). It seems that my buddy Blake has been making these little boxes for his own projects. I told him what the box needed to do and he said "no problem." He builds these himself and installs them in really robust enclosures that are suited for a car environment.

The heart of it is an Arduino Nano (whateverthefuckthatis), and some other electronic bits. The header side uses Molex connectors that I will source from Mouser and make the appropriate harness.

I am pretty excited to get this rolling further along. Stay tuned for more soon!
Andrew
I am learning way more than I wanted about CAN, Arduino, RasberryPies, and all manner of other electronic gizmos, than I really planned on with this electronic steering business. However, I feel like I have to make the system work as it was intended by Toyota in order to get the most out of it and to be able to diagnose it in the future should something fail.
This afternoon I popped into the local junk yard to track down an OBDII connector (or two). I quickly realized that although the connectors are universal in terms of the mating portion, various manufacturers use different connector bodies and terminals. After I realized this, I started looking for the same make of car. It just so happened that I had relatively easy access to a few Nissans and they graciously offered their connectors in the form of a OBDII bouquet.
I only need one connector, but I figured it was a good idea to have extra wires and terminals, just in case.
I also managed to secure reliable help with the CANBUS emulator (that's what I am calling it). It seems that my buddy Blake has been making these little boxes for his own projects. I told him what the box needed to do and he said "no problem." He builds these himself and installs them in really robust enclosures that are suited for a car environment.
The heart of it is an Arduino Nano (whateverthefuckthatis), and some other electronic bits. The header side uses Molex connectors that I will source from Mouser and make the appropriate harness.
I am pretty excited to get this rolling further along. Stay tuned for more soon!
Andrew
11-26-2018, 04:00 PM
#999
Way cool!
I've thought about using Arduino for automotive purposes but a former coworker said they weren't robust enough. He didn't elaborate and I honestly don't see why. Add that I've seen pictures and videos or topics on forums about several people mounting them in cars for various purposes during my research makes me want to start looking into it again.
I've thought about using Arduino for automotive purposes but a former coworker said they weren't robust enough. He didn't elaborate and I honestly don't see why. Add that I've seen pictures and videos or topics on forums about several people mounting them in cars for various purposes during my research makes me want to start looking into it again.
11-26-2018, 04:19 PM
#1000
TECH Senior Member
Thread Starter
iTrader: (7)
Way cool!
I've thought about using Arduino for automotive purposes but a former coworker said they weren't robust enough. He didn't elaborate and I honestly don't see why. Add that I've seen pictures and videos or topics on forums about several people mounting them in cars for various purposes during my research makes me want to start looking into it again.
I've thought about using Arduino for automotive purposes but a former coworker said they weren't robust enough. He didn't elaborate and I honestly don't see why. Add that I've seen pictures and videos or topics on forums about several people mounting them in cars for various purposes during my research makes me want to start looking into it again.
https://github.com/carloop/simulator
http://www.cannylogic.com/c7
http://www.cananalyser.co.uk/candoauto.html
The CANdo Auto module is what Jared used 3 years ago. It is small, looks robust, has it's own software, will do what I want, but it is $300!
Andrew